
Робототехника за последние десятилетия стала фундаментом современной автоматизации. Её используют на конвейерах автомобильных заводов, в микроэлектронике, пищевой индустрии, фармацевтике и даже в металлургии. От простых манипуляторов роботы превратились в сложные системы с искусственным интеллектом, сенсорикой и возможностью работать рядом с человеком. Чтобы выбрать подходящую модель, необходимо понимать, какие существуют типы промышленных роботов, чем они отличаются друг от друга и какие задачи решают наиболее эффективно.
Сегодня существует несколько подходов к классификации. Одни инженеры выделяют роботов по кинематической схеме, другие — по назначению, уровню взаимодействия с человеком или особенностям эксплуатации. Именно такая многоуровневая классификация позволяет рассматривать роботов не как однотипные механизмы, а как разнообразный инструментарий для производственных задач.
Критерии классификации промышленных роботов
Если рассматривать роботов с точки зрения инженерии, их можно описать по целому ряду характеристик. Важен диапазон движений, количество степеней свободы, рабочая зона и точность позиционирования. Не менее значим способ крепления: одни роботы устанавливаются на полу или платформе, другие подвешиваются к потолочным балкам, третьи размещаются на мобильных базах. Разделяют также по принципу управления: полностью автоматические решения программируются под конкретный цикл, а адаптивные способны корректировать действия в реальном времени благодаря сенсорам и компьютерному зрению.
Отдельным критерием является назначение. Робот, спроектированный для сварки кузовов, имеет иные характеристики, чем устройство для сборки микросхем или фасовки продуктов. Влияет и степень автономности: существуют системы, полностью заменяющие человека на участке, и роботы, рассчитанные на совместную работу с оператором. Такая многомерная классификация даёт базу для понимания всех последующих разновидностей.
Классификация по отношению к человеку
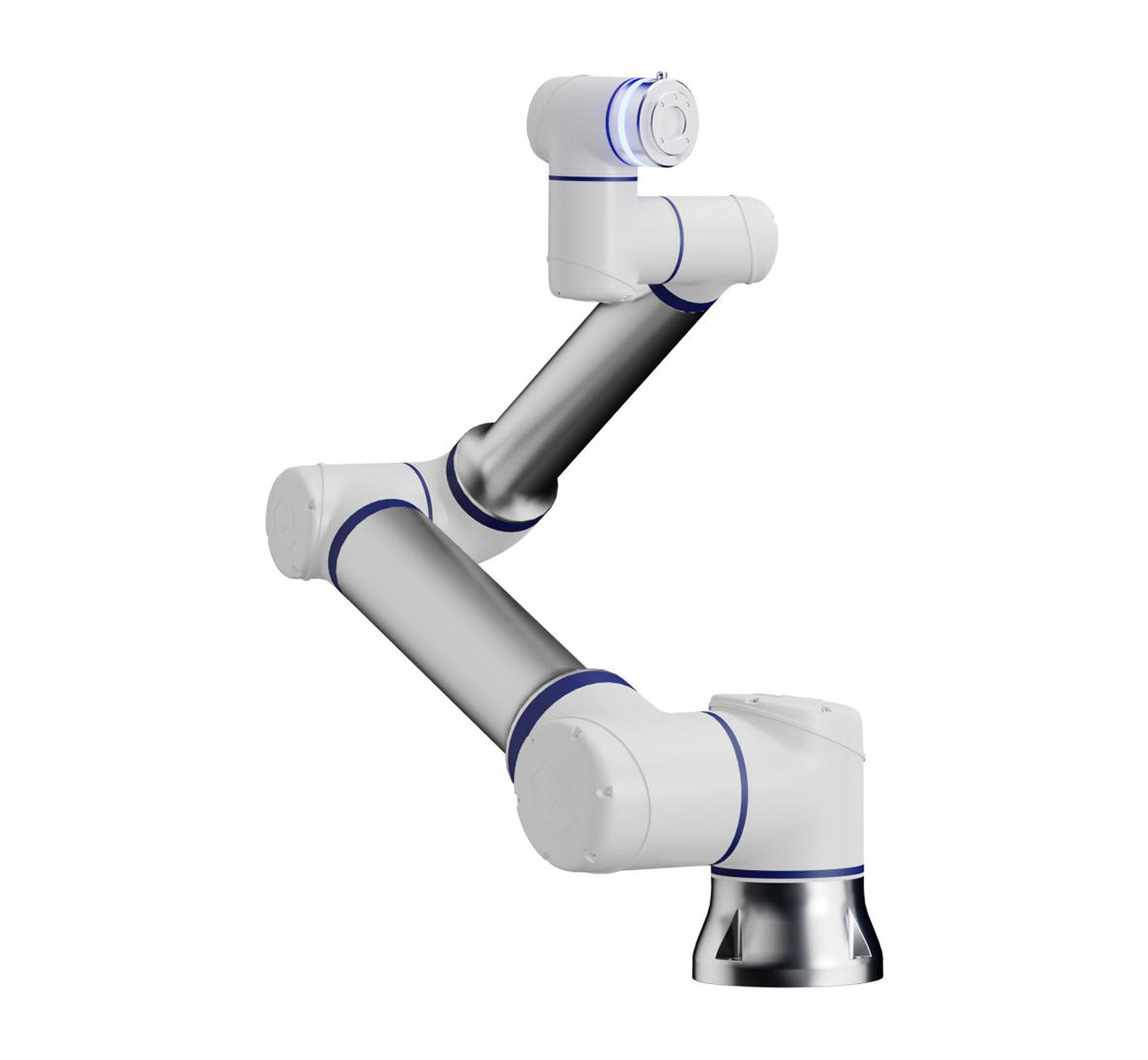
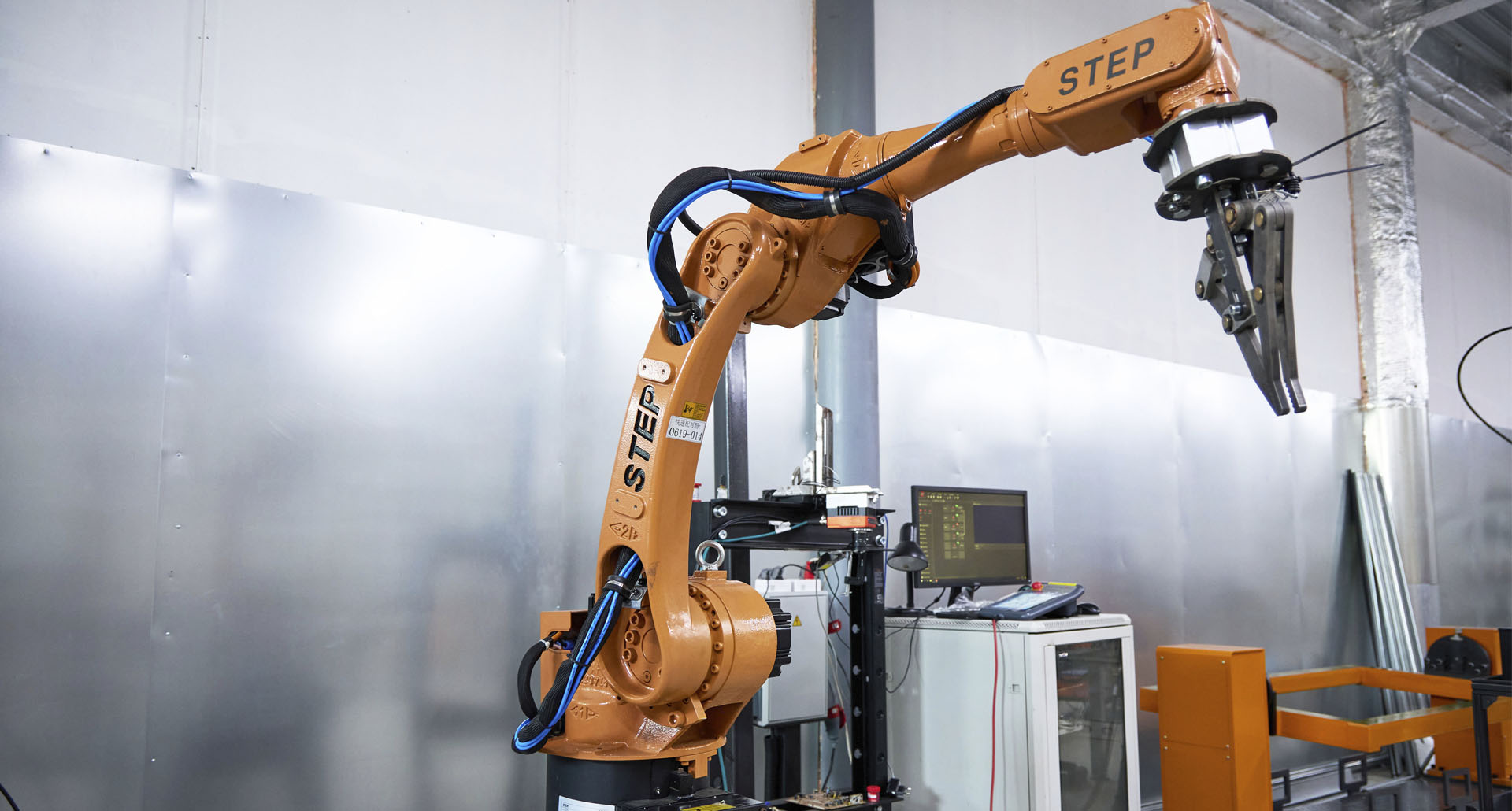
Наиболее интересным направлением сегодня считается деление роботов по особенностям применения и взаимодействия с человеком: коллаборативные роботы (роботы, работающие в коллаборации с человеком в одной рабочей зоне) и общепромышленные, доступ человека в зону которых запрещён.
Другие классификации и виды

Такие устройства заменяют погрузчики и тележки, работают круглосуточно, интегрируются с системами управления складом. Они могут оснащаться лидарами и камерами, что позволяет свободно ориентироваться в пространстве и избегать столкновений с людьми.


Отдельно стоит выделить роботов, предназначенных для экстремальных условий. На производствах фармацевтики и микроэлектроники они эксплуатируются в чистых комнатах, где требуется абсолютная стерильность и минимальное выделение частиц. В химической промышленности и металлургии роботы должны выдерживать высокие температуры, агрессивные среды и вибрации. Есть и противоположные примеры: решения для работы при пониженной температуре или в условиях повышенной радиации. Все эти виды нельзя назвать массовыми, но именно они позволяют автоматизировать наиболее опасные процессы.
Таким образом, классификация по назначению и условиям работы показывает, насколько разнообразен современный рынок. От коботов для небольших мастерских до автоматических погрузчиков или гигантских систем для атомных станций — диапазон применения промышленных роботов охватывает практически всю экономику.
Сравнительный анализ применения
Выбор конкретного вида промышленного робота всегда зависит от задач предприятия. Если ключевой фактор — высокая скорость и повторяемость, предпочтение отдают специализированным решениям: сварочным или покрасочным роботам-манипуляторам. Когда требуется гибкость и возможность быстрой перенастройки, эффективнее коллаборативные роботы. Для логистики и внутреннего перемещения материалов подходят автономные AGV-тележки. Если предприятие связано с опасными условиями, то без роботов для экстремальной среды не обойтись.
Тенденции и новинки

Особое место занимают облачные сервисы и удалённое управление. Современные роботы могут подключаться к корпоративной сети, отправлять данные о своём состоянии и получать обновления алгоритмов в режиме реального времени. Это позволяет использовать машинное обучение для прогнозирования поломок и оптимизации рабочих циклов.
Кейсы применения
На автомобильных заводах уже давно используются сварочные и покрасочные роботы. Их внедрение позволило не только ускорить процесс производства, но и значительно повысить безопасность, исключив контакт рабочих с токсичными материалами и высокими температурами. В фармацевтике и пищевой промышленности активно применяются коботы, легко перестраивающиеся под новые партии продукции и обеспечивающие стерильность операций.

Таким образом, современные промышленные роботы делятся на множество категорий, и каждая из них имеет собственные сильные стороны. Коллаборативные системы подходят для предприятий, где важна гибкость и безопасность взаимодействия с человеком. Паллетайзеры решают задачи сборки паллет, а AGV-тележки обеспечивают автоматическую логистику внутри склада.

Знание типов (видов) и особенностей роботов помогает предприятиям выбирать оптимальные решения для своих задач. В условиях растущей конкуренции и перехода к цифровому производству именно правильный выбор оборудования становится фактором эффективности работы конкретного предприятия, определяя его производительность, качество выпускаемой продукции и способность гибко адаптироваться к изменениям рыночной конъюнктуры.



Часто задаваемые вопросы
Существуют такие типы промышленных роботов, как коллаборативные роботы (коботы), SCARA, AGV/AMR системы и роботы-манипуляторы. Коллаборативные роботы работают рядом с человеком, оснащены датчиками и системами машинного зрения. SCARA-роботы обеспечивают гибкость в горизонтальной плоскости и жесткость по вертикали, идеально подходя для операций сборки. AGV/AMR системы — это автономные транспортные средства для перемещения по складам.
Промышленные роботы применяются в автомобильной промышленности для сборки и сварки, в микроэлектронике для установки компонентов, в пищевой индустрии и фармацевтике для упаковки и фасовки, а также в металлургии для выполнения задач в экстремальных условиях. Они также используются в складской логистике для автоматизации перемещения товаров.
Размеры и формы заготовок, которые могут обрабатывать промышленные роботы, зависят от конкретного типа робота и его назначения. Например, SCARA-роботы подходят для работы с мелкими и средними компонентами в электронике, тогда как роботы-манипуляторы могут работать с более крупными и тяжелыми объектами в автомобильной индустрии.
Промышленные роботы могут оснащаться различными опциями, такими как системы машинного зрения, сенсоры для адаптивного управления, лидары и камеры для автономной навигации в AGV/AMR системах. Эти опции позволяют роботам работать в более сложных и динамичных условиях, повышая эффективность и безопасность.
Коллаборативные роботы, или коботы, обеспечивают безопасную работу рядом с человеком благодаря датчикам силы и системам машинного зрения. Их основное преимущество — гибкость и простота перенастройки, что позволяет быстро адаптироваться к смене задач. Они могут монтироваться прямо на рабочем столе и использоваться в сборке электроники или упаковке продукции, снижая необходимость в сложных ограждениях.